Regeneron ISEF 2024 ROBO First Award: Highlights and Analysis
In the previous article, Embark Tutor analyzed the winning projects in the Plant Sciences (PLNT) category in detail. Today, let's continue to focus on the Robotics and Intelligent Machines (ROBO) category in the 2024 ISEF Global Finals to see how these outstanding researches stand out from the fierce competition.
In today's era of rapid technological development, the Robotics and Intelligent Machines (ROBO) category is particularly eye-catching in 2024 ISEF Global Finals. Research in this field is not only about the application of robotics and artificial intelligence, but also about the future technological trends and important directions of social development.
With the increasing maturity of automation technology and the widespread application of intelligent systems, research in the ROBO category is of great significance for improving production efficiency, solving real problems, and promoting the development of various fields. For example, in the industrial field, the introduction of intelligent robots can greatly improve the efficiency and quality of production lines, reduce manpower input and resource waste; in the medical field, intelligent medical equipment and robotic surgical systems can provide more accurate treatment plans and improve the quality of life of patients; in the service field, the use of intelligent robots can improve service quality and meet people's growing personalized needs.
As an educational institution, Embark is well aware of the importance and potential of the ROBO field. We focus on providing Comprehensive ISEF project assistance services for students interested in the field of Robotics and Intelligent Machines (ROBO), helping them to gain an in-depth understanding of the cutting-edge development of robotics and artificial intelligence, providing more thinking perspectives and learning resources, stimulating academic interest, promoting academic exchanges, and helping students explore and innovate in the field of science and technology. Through our tutoring, students can better understand the application prospects of robots and intelligent machines, and actively participate in the tide of scientific and technological progress and social development.
In this article, Embark teacher made a detailed analysis of the ROBO first prize project, aiming to provide readers with more thinking perspectives and learning resources, hoping to inspire inspiration and promote academic exchanges.
Regeneron ISEF 2024 ROBO First Award-Highlights
- Project Name
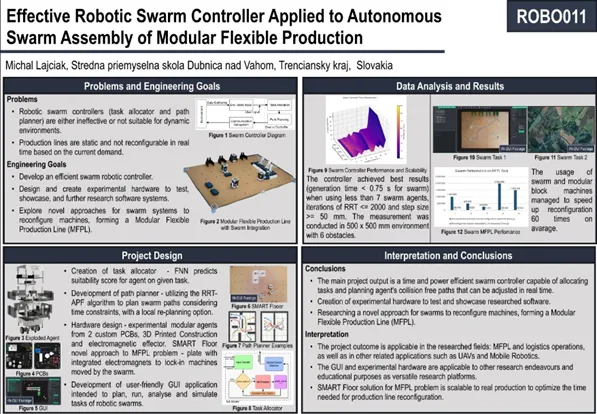
ROBO011 - Effective Robotic Swarm Controller
- Project Introduction
This Regeneron ISEF Award-Winning Project aims to develop an efficient robot swarm controller that can perform path planning and task allocation in a dynamic environment. The functions of the controller were verified by customizing experimental hardware and modular flexible production line environment testing. The controller uses a feedforward neural network for task allocation and a hybrid RRT-APF algorithm to solve the multi-agent path planning problem, which improves the efficiency and flexibility of the production process and reduces the cost of production line reorganization.
This project successfully simulates a modular flexible production environment and is applicable to centralized and decentralized robot swarms. In the future, this research result is expected to be applied to actual robot swarms to meet real-world challenges.
Regeneron ISEF 2024 ROBO First Award-Analysis
This project won the first prize in the ROBO category of ISEF, mainly due to its unique conception and innovative application scenario design. The project goal is to develop a robot swarm controller that can perform path planning and task allocation in a dynamic environment, which is itself challenging and in line with the current development trend of industrial automation and intelligent manufacturing.
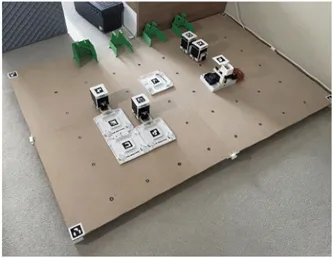
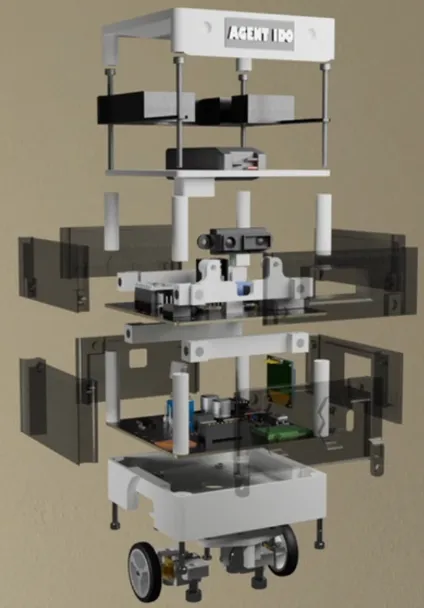
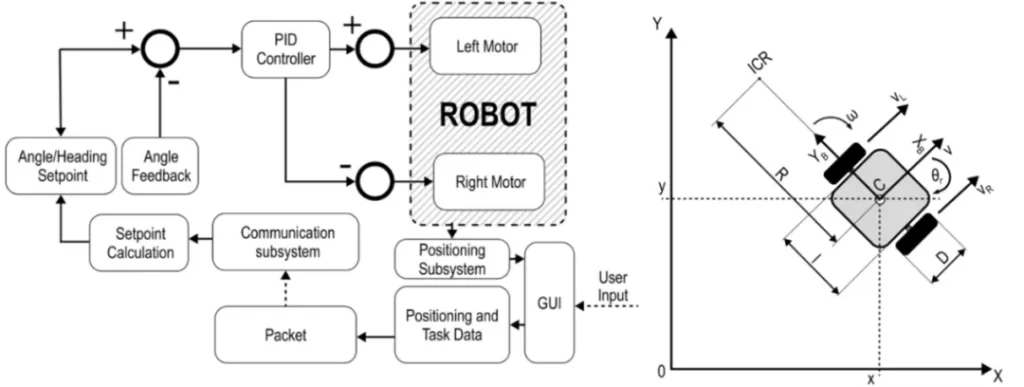
In terms of hardware construction, the project team demonstrated considerable technical maturity, building a fully functional robot cluster through differential drive wheels, ESP32 communication modules and visual positioning systems. In particular, the project adopted a stable and reliable solution in terms of robot positioning and communication.

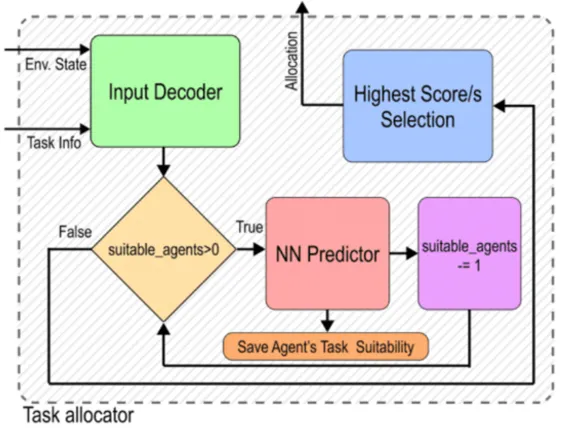
The design of the task allocator is one of the highlights of the project. It uses a multi-layer perceptron (a feedforward neural network) to predict the adaptability of each robot to a specific task. By manually remotely marking 500 sets of training data, the project team successfully trained a model that can reasonably allocate robots according to different tasks. This data-driven approach has great potential in improving production efficiency.
However, the project has certain limitations in path planning. The project team tried to solve the multi-agent path planning problem by defining a "cluster clock", but the implementation method was relatively simple and crude and lacked flexibility. At the same time, although the RRT path planning algorithm used in the project is classic, it was not optimized in this project, resulting in the possibility that the generated path is not optimal and the obstacle avoidance function cannot be achieved. These limitations have affected the overall performance and application scope of the project to a certain extent.
Nevertheless, the project still demonstrates the great application potential of robot swarm controllers in dynamic environments. In the future, the performance and intelligence level of robot swarm controllers can be further improved by introducing more advanced path planning algorithms (such as Hybrid A*, etc.) and map perception technologies (such as SLAM). Overall, this project provides a valuable exploration direction for the field of industrial automation, and its conception and application scenario design are worth learning from and developing.
This article analyzes in detail the research highlights and application potential of the first-place winning project "Efficient Robot Swarm Controller" in the Robotics and Intelligent Machines (ROBO) category in the 2024 Regeneron ISEF Global Finals . Through in-depth analysis of hardware construction, task allocation, and path planning, the project demonstrates the great application prospects of robotics in dynamic environments and provides a valuable exploration direction for the field of industrial automation.
In the next article, we will take a deep look at the winning projects in the Systems Software (SOFT) category to see how these system software innovations promote the development and application of information technology. Please continue to follow our updates for more exciting analysis of the winning works of the 2024 ISEF Finals.
At the same time, Embark launched the ROBO101 Dream-Building Robot project this summer. ROBO101 explores the mysteries of future technology with top teams. Letting children participate in scientific and technological innovation activities has become one of the important ways to promote scientific education and cultivate innovative talents. MIT, Caltech and other world-leading science and technology universities also use scientific and technological innovation capabilities as an important reference condition in the application requirements. It can be seen that top universities attach importance to interdisciplinary literacy, hands-on practical skills and innovative spirit in STEM education.
ROBO101 Dream-Building Robot integrates STEM education concepts and will lead children to cross disciplinary boundaries, integrate wisdom in science, technology, engineering, mathematics and other fields, and create unique interdisciplinary thinking. Disciplines are boundless and fun is unlimited. ROBO101 Dream-Building Robot will give wings to children's future technological dreams and decipher the unknown and magical world!
If you are interested in ROBO101 Dream-Building Robot and want to stand out in scientific research competitions, please consult Embark Education. We provide high-quality personalized ISEF tutoring services to help students explore and innovate in the field of science and technology.
Click here to view the analysis of previous Regeneron ISEF 2024 winning works:
1.The Regeneron ISEF 2024 Global Finals Winning Projects: Highlights and Analysis
2.Regeneron ISEF 2024 BMED First Award: Highlights and Analysis
3.Regeneron ISEF 2024 ENBM First Award: Highlights and Analysis
4.Regeneron ISEF 2024 CELL First Award: Highlights and Analysis
5.Regeneron ISEF 2024 CBIO First Award: Highlights and Analysis
6.Regeneron ISEF 2024 EBED First Award: Highlights and Analysis
7.Regeneron ISEF 2024 EGSD First Award: Highlights and Analysis
8.Regeneron ISEF 2024 PHYS First Award: Highlights and Analysis
9.Regeneron ISEF 2024 PLNT First Award: Highlights and Analysis
Keywords: